

Moderne Produktionssysteme zeichnen sich durch eine intelligente Vernetzung von Maschinen und Abläufen durch Verwendung von Informations- und Kommunikationstechnologien aus. Diese intelligente Vernetzung ist für Unternehmen notwendig, um in dem sich wandelnden Wettbewerbsumfeld mithalten zu können. Ein Roboter ist in erster Linie eine Maschine, die sich in mehreren Achsen frei, ähnlich einem menschlichen Arm, bewegen und somit unterschiedliche Aufgaben bewältigen kann. Dieser muss von Menschen programmiert und gesteuert werden. Daraus resultiert, dass der Roboter nicht in der Lage ist Entscheidungen selbst zu treffen oder den Verfahrweg selbst zu bestimmen. An dieser Stelle kommt die künstliche Intelligenz, auch KI genannt, zum Einsatz. Mit Hilfe eines Kamerasystems erhält der Roboter die Möglichkeit zu sehen. Auf Grundlage dieses essenziellen Sinns ist der Roboter in der Lage seine Umgebung wahrzunehmen und darauf basierend gewisse Entscheidungen selbst zu treffen
Vorteile der Lösung
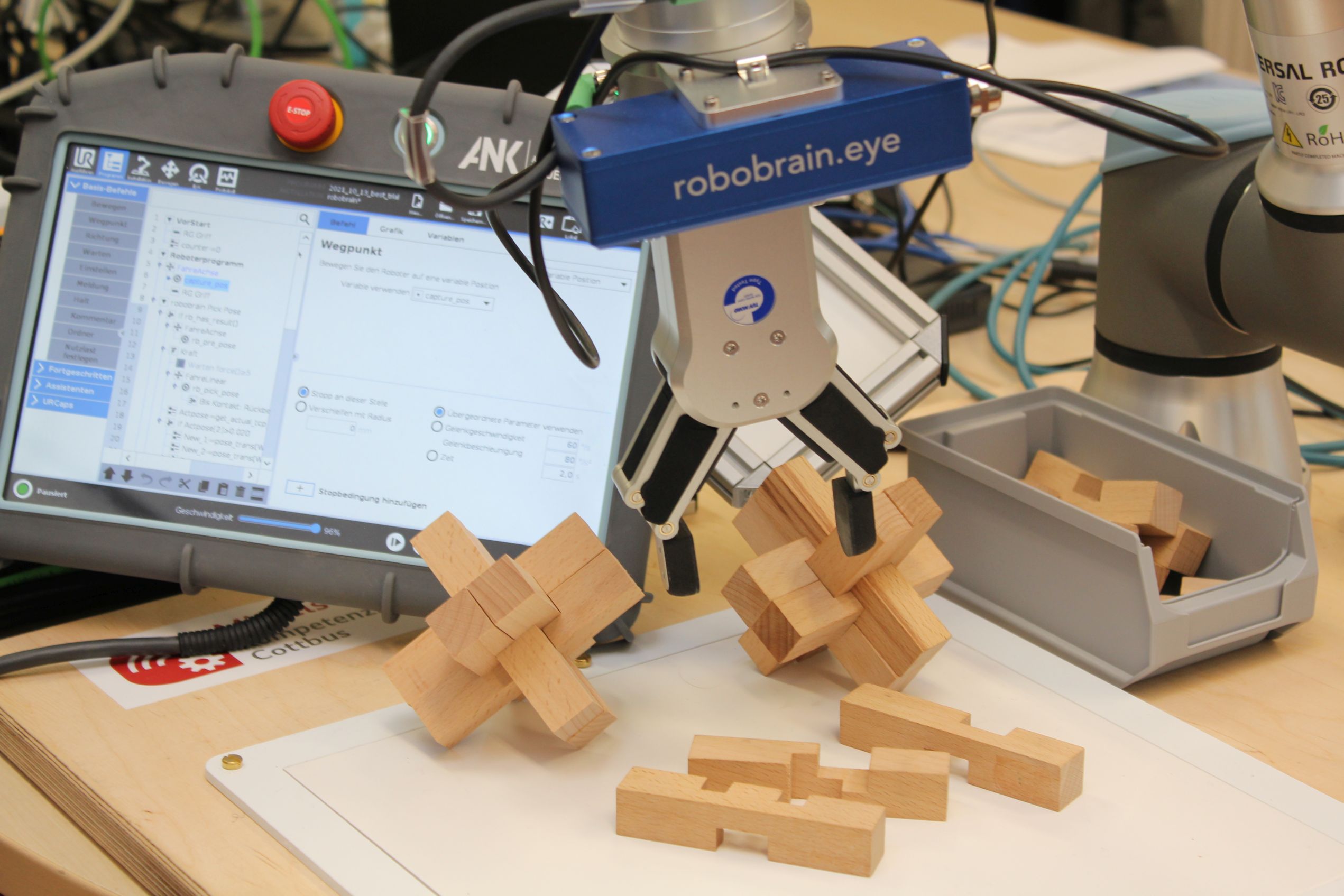
Das eingesetzte KI gestützte Kamerasystem von der münchener Firma Robominds ermöglicht dem Roboter selbst Entscheidungen zu treffen. Die Ansteuerung des kollaborierenden Roboters, in diesem Fall ein Universal Robot UR3e, erfolgt über Algorithmen, die in der Lage sind entsprechend der Bildinformationen Kanten und Objekte sowie Tiefen zu erkennen. Aus diesen Informationen lassen sich Koordinaten ermitteln, die der Roboter selbstständig ansteuert. Durch diese hinzugewonnene Fähigkeit ist der Roboter in der Lage Bauteile, Gegenstände oder sonstige Objekte zu greifen und woanders abzulegen oder einzubauen.So können sich Objekte an einem beliebigen Ort in Reichweite des Roboters befinden und müssen nicht eine fest definierte Position in Höhe, Breite und Länge einnehmen. Der Roboter identifiziert die Größe des Objekts, die Lage und Position und ist damit in der Lage selbstständig zu entscheiden, wie er an welcher Stelle das Bauteil greift. So ergeben sich eine Vielzahl an Anwendungsmöglichkeiten und sorgen für mehr Flexibilität in einer teil- oder vollautomatisierten Umgebung. Ein Beispiel ist das intelligente Greifen von Paketen aus einer großen Transportbox. Die Pakete sind wahllos in Position und Lage angeordnet und weisen unterschiedlichste Größen und Geometrien auf. Normalerweise muss der Mensch, als intelligentes Wesen, diesen Schritt übernehmen, die Pakete aus der Transportbox nehmen und dem Verteilersystem zuführen. Der intelligente Roboter kann jedoch genau diese monotone Aufgabe übernehmen, wodurch der Mitarbeiter andere Aufgaben ausführen kann oder weniger Mitarbeiter im Allgemeinen benötigt werden.
Genutzte Technologien/ Demonstrationsszenarien
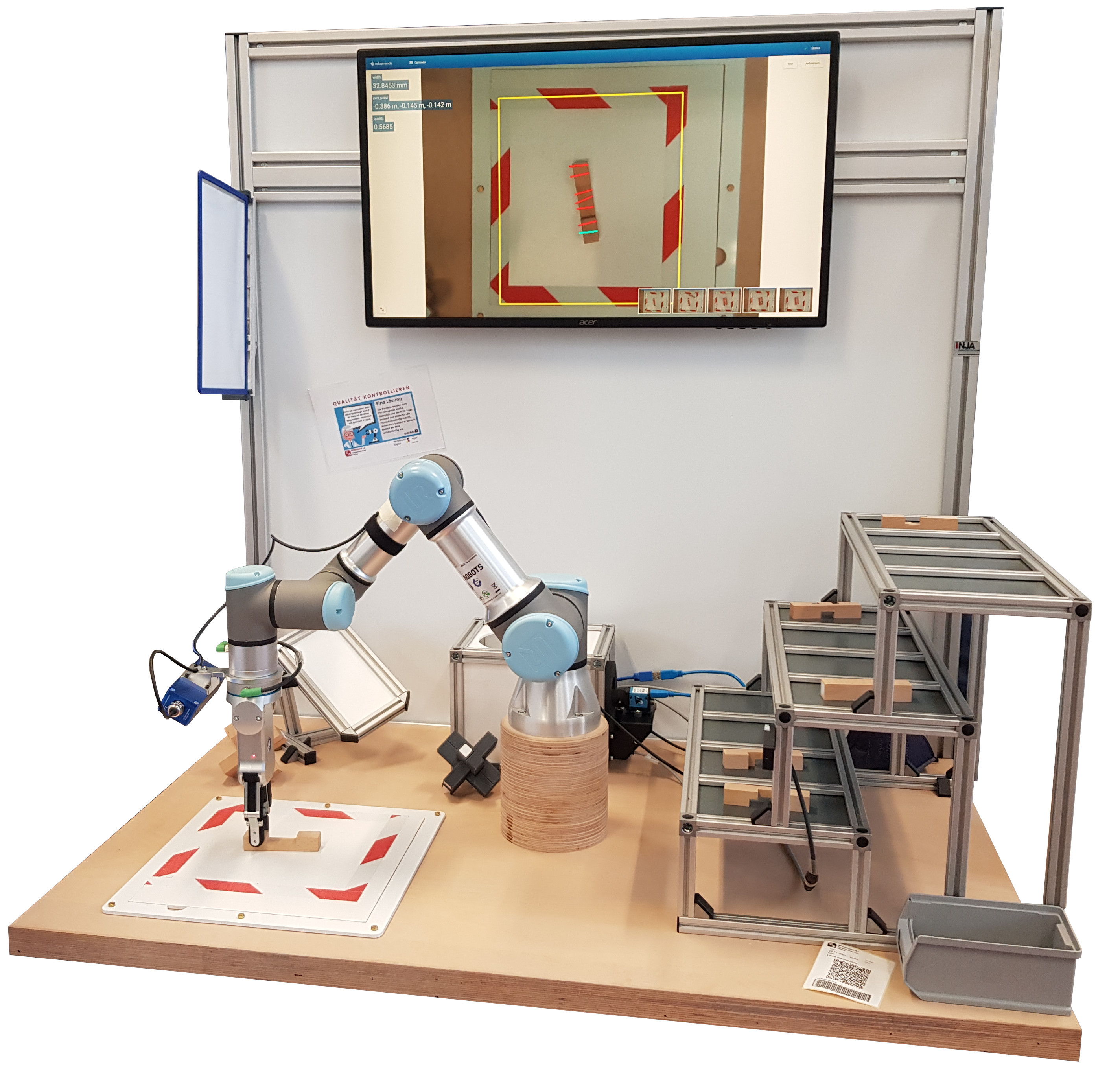
Im Beispielszenario der Roadshow wird ein intelligenter Roboter für das Wegsortieren von Einzelteilen eingesetzt, welche in einem gekennzeichneten Bereich ausgeschüttet werden. Diese Kennzeichnung wird benötigt, sodass der Roboter nur in einem überschaubaren Bereich agieren muss und somit aktiv zur Arbeitssicherheit beiträgt und nicht mit anderen Objekten kollidiert. Liegen Bauteile in dem Greifbereich, fängt der Roboter an die Position und Lage selbstständig zu bestimmen und die Teile entsprechend der verfügbaren Greifbereiche aufzunehmen. War das Greifen erfolgreich, erfolgt eine Bauteilzentrierung, sodass eine Kollision mit anderen Objekten vermieden werden kann. Diese Maßnahme ist im Falle des eingesetzen Robominds-Systems notwendig, da hier die Bauteile nicht wie bei anderen KI-System trainiert werden müssen. Durch den Ansatz der 3-Dimensionalen Raumerfassung und dessen Auswertung, werden die Bauteile im Falle des Parallelgreifer-Skills über Einstellung wie minimal/ Maximale Greifbreite, Anzahl der Greifpositionen oder die Greifparallelität in Abhängigkeit des Bauteils analysiert. Das System ermöglicht somit auch unproblematisch überlagerte und querliegende Bauteile zu erkennen und durch kompination mehrerer Skills auch geometrisch unterschiedliche Bauteile autark ohne Training zu identifizieren. Durch die flexible Gestaltung der verschiedenen Parameter ist der Einsatz von KI auch ganz ohne stundenlanges zusätzliches Training möglich. Das ist der Hauptvorteil, des verwendeten Systems. Nach der Zentrierung wird das Bauteil über einen RFID Tag identifiziert und vom Roboter an der entsprechenden Lagerposition abgelegt. Wenn man keinen Parallelgreifer einsetzen kann, bspw. weil die Bauteile sehr flach sind, gibt es auch die Möglichkeit auf Vakkuumgreifer-Skills zurückzugreifen.
Einsatzgebiete/ Branchen
Die im Demonstrationsszenarium vorgestellte Technologie eignet sich für Unternehmen, die verschiedene Objekte sortieren oder bewegen müssen. Wie bei vielen Roboterlösung sollte eine entsprechende Anzahl an Wiederholung vorliegen für einen Sinnvollen Einsatz. Daher eignet sich ein intelligenter Roboter vor allem im Bereich der Logistik und in automatisierten Produktionssystemen, bei denen Objekte unterschiedlichster Form, Größe, Position und Lage indentifiziert und bewegt werden müssen. Ein KI gestütztes Kamerasystem ermöglicht ermöglicht eine Vielzahl von Anwendungen. Dazu gehören bspw.:
- Pick‘n’Place-Aufgaben
- Qualitätssicherung mittels Objekterkennung
- teilautomatisierte Kabelkonfektionierung (Leitung erkennen, greifen, konfektionieren)
Auch ohne Roboter besitzen KI-unterstütze Kamerasysteme verschiedenste Einsatzgebiete, bspw. bei der
- Überwachung von Wachstumsraten in Gewächshäusern
- Analyse von Verhaltensmustern von Tieren in Zuchtbetrieben
- oder bei der Dokumentendigitalisierung (OCR) im administrativen Umfeld.